湖南亿拓膜建筑工程有限公司
Hunan Yituo Membrane Construction Engineering Co., Ltd
0731-88678018
15802628902 15973131978
15802628902 15973131978
1 活动厂房概述
某公司在两条相领拼装线上有两个完全相同的大跨度活动厂房。每个活动厂房的长为80米、宽为68米、高为25.3米,主要结构分为地面行走轨道、钢轮式行走机构、门式桁架主体、墙屋面板维护,所有材料均采用钢材加工制作,总重约800吨(不包括轨道重量)。活动厂房由两侧44个安装滚动轴承的钢轮支撑,每侧均匀分布22个钢轮。钢轮置于两条跨距62米的平行轨道上,其每条轨道长240米。活动厂房原设计未安装驱动系统,但是采取附加驱动系统可以驱动活动厂房在拼装线上缓慢往返移动,最大有效行程为160米。
2驱动技术的比较及选择
2.1驱动技术比较
目前,国内外已经有很多原始或先进的驱动技术应用于活动厂房,主要分为以下几种驱动技术。
(1)采用电动机减速器驱动
便于控制,安全性高,但每个活动厂房需独立配置电动机减速器,严重占用资源,且总体成本较高。
(2)采用卷扬机滑轮组牵引驱动
牵引力、牵引速度较难控制,移动时活动厂房晃动大,制动性差、安全性差,且影响生产线正常生产。
(3)采用液压提升器穿钢绞线牵引驱动
移动安全性有较大提高,但钢绞线作为柔性索具,具有较大弹性,同步控制较难实现,制动性差。
2.2驱动技术选择
对于一个方案来说,安全是前提,经济是最终目的,技术是保障。各种驱动技术都有其优缺点和一定的针对性,因此,驱动技术的选择须综合考滤各方面因素。根据某公司已有资源和活动厂房的特点,通过安全性及经济性对比分析,现有驱动技术均不是最优方案。为获得最优方案,最终选择液压爬行驱动技术。
3液压爬行驱动技术的原理及特点
3.1驱动技术的原理
3.1.1 驱动系统组成
驱动系统主要由电力系统、液压系统、执行机构、控制系统和监测系统组成,各系统或机构之间相互作用,协调工作。驱动系统采用自锁型液压爬行器作为驱动执行机构,电力祁液压系统作为动力源,控制和监测系统作为安全保障。
自锁型液压爬行器为组合式结构,一端以楔型夹块与移动轨道连接,另一端以铰接点形式与活动厂房连接,中间利用液压油缸驱动爬行。
3.1.2驱动系统原理
本系统是通过电液动力源驱动自锁型液压爬行器进行工作,同时利用多种传感器跟踪监测,实现自动控制驱动过程。液压爬行驱动技术采用计算机控制,通过数据反馈和控制指令传递,实现同步动作、负载均衡、姿态矫正、应力控制、操作闭锁、过程显示和故障报警等多种功能。
驱动系统充分利用了自锁型液压爬行器的工作原理。自锁型液压爬行器的楔型夹块具有单向自锁作甩当油缸伸出时,夹块工作(夹紧),自动锁紧移动轨道,活动厂房沿油缸伸长前方移动油缸缩回时,夹块不工作(松开),与油缸同方向移动,此时活动厂房静止不动;按照此种周期进行循环工作,每周期活动厂房移动量约为油缸伸缩长度。
3.2驱动技术的特点
3.2.1缺点
(l)驱动过程不连续,每次移动行程为500mm左右:
(2)单独采购成套设备价格较高;
(3)受某些因素影响,在特点环境下实甩3.2.2优点
(1)驱动系统独立安装,安装和拆卸方便,多个活动厂‘房使用一套驱动系统,还可以应用于其它工程;
(2)液压爬行器、行走轨道和活动厂房之间采用刚性连接,移动精度高,移动平稳,且安全可靠;
(3)移动过程的推进力和推进速度完全可以跟踪测量、控制,同步性易控制,制动性好;
(4)液压爬行器自行吸附轨道,可实现单向自锁,无须增设反力架机构(反力点);
(5)移动过程如有意外超载或同步超差时,系统将及时、准确地作出调整并报警,使移动过程更加安全、可靠;

实地考察Field investigation

 实地考察
实地考察
专注膜建筑

精心选材Carefully selecting materials

 精心选材
精心选材
技术工程师1对1指导设计

使用寿命长Long service life

 使用寿命长
使用寿命长
按需定制安装优化方案

实力团队Technical Training

 实力团队
实力团队
为项目提供专业的售后

售后服务after-sale service

 售后服务
售后服务
支持个性化定制

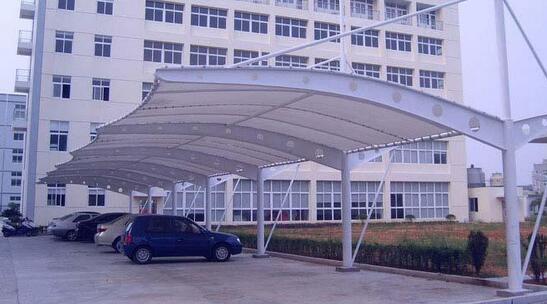
 工业设施膜结构
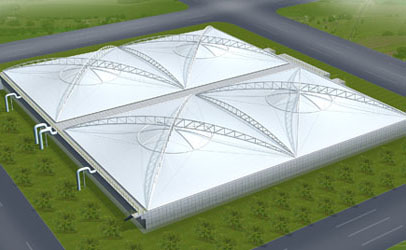
工业设施膜结构 环保设施膜结构
环保设施膜结构 遮阳定型伞
遮阳定型伞 萍乡硖石广场景观张拉膜
萍乡硖石广场景观张拉膜 实验中学风雨棚膜结构长廊和..
实验中学风雨棚膜结构长廊和.. 公安局驾考中心风雨长廊膜结构
公安局驾考中心风雨长廊膜结构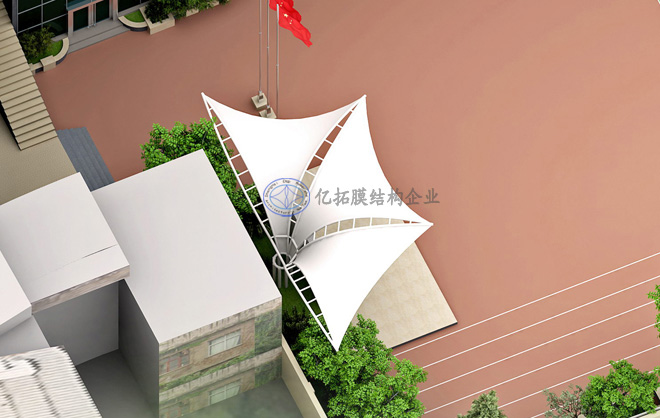 三桥小学膜结构造型主席台
三桥小学膜结构造型主席台 贺家土中学膜结构看台遮阳棚
贺家土中学膜结构看台遮阳棚 ETFE 透明膜
ETFE 透明膜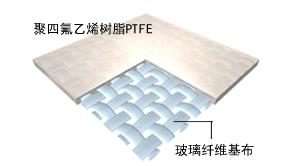 PTFE 永久性膜材
PTFE 永久性膜材 PVDF 常用膜材
PVDF 常用膜材 景观张拉膜结构拉膜亭施..
景观张拉膜结构拉膜亭施.. 张拉膜结构主席台等索膜..
张拉膜结构主席台等索膜.. 公司简介
公司简介 企业文化
企业文化 服务及保障
服务及保障 联系我们
联系我们